Dienstag, 15. Juni 2021
#896
Mittel / Medium
Servus Mario,
leider habe ich Probleme bei der Umsetzung der Planung in den Flug.
Drohne: DJI Mavic 2 Enterprise Advanced
Die klm-Datei habe ich beim DJI-Controller über „Flugauftrag“ „KML Importieren“ „Wegpunkte“ und dann von der SD-Karte herunter geladen.
Für den Flug habe ich dann die in der „Bibliothek“ aufscheinende kml-Datei geöffnet.
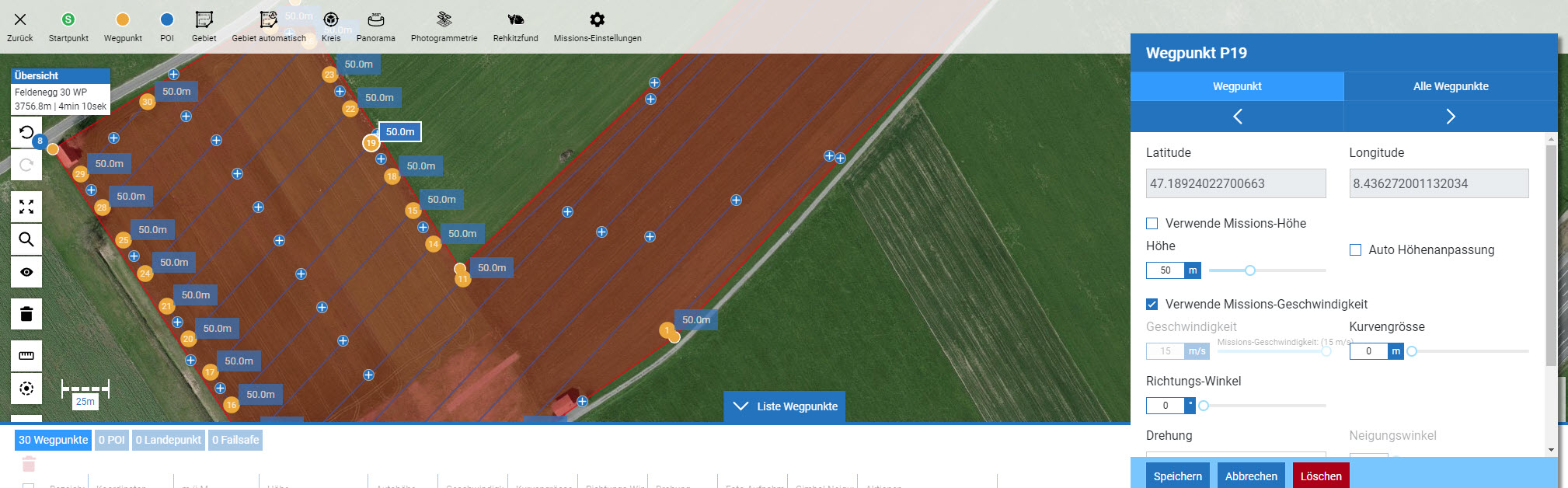
Probleme: Ich möchte, dass der Gimbal beim Flug immer direkt nach unten gerichtet ist – daher habe ich unter „Gimbal-Neigungsmodus“ interpolieren sowie beim „Neigungswinkel“ -90 eingegeben.
Die Geschwindigkeit habe ich mit „10 km/h“ – also ca. 3 m/s – festgelegt.
Beides funktionierte nicht so und ich musste daher ad hoc auf manuellen Flug umdisponieren. Das einzig positive ist, dass ich die geplante Flugstrecke sehe und dies Route nun manuell nachfliege. Die Höhenanpassung muss man natürlich auch „nach Gefühl“ manuell steuern.
Insgesamt ist dies natürlich unbefriedigend und ich bin mir sicher, dass dies alles auch richtig funktioniert was mache ich falsch?
leider habe ich Probleme bei der Umsetzung der Planung in den Flug.
Drohne: DJI Mavic 2 Enterprise Advanced
Die klm-Datei habe ich beim DJI-Controller über „Flugauftrag“ „KML Importieren“ „Wegpunkte“ und dann von der SD-Karte herunter geladen.
Für den Flug habe ich dann die in der „Bibliothek“ aufscheinende kml-Datei geöffnet.
Probleme: Ich möchte, dass der Gimbal beim Flug immer direkt nach unten gerichtet ist – daher habe ich unter „Gimbal-Neigungsmodus“ interpolieren sowie beim „Neigungswinkel“ -90 eingegeben.
Die Geschwindigkeit habe ich mit „10 km/h“ – also ca. 3 m/s – festgelegt.
Beides funktionierte nicht so und ich musste daher ad hoc auf manuellen Flug umdisponieren. Das einzig positive ist, dass ich die geplante Flugstrecke sehe und dies Route nun manuell nachfliege. Die Höhenanpassung muss man natürlich auch „nach Gefühl“ manuell steuern.
Insgesamt ist dies natürlich unbefriedigend und ich bin mir sicher, dass dies alles auch richtig funktioniert was mache ich falsch?

Es gibt noch keine Antworten zu diesem Ticket.
Sei der Erste der antwortet.
Sei der Erste der antwortet.